


This project was a follow-up to the one I posted here, about using a Moteino radio module to transmit TMCC commands to a compact board that would control the MTH signalman caboose. The MTH caboose has very little space for a remote control board, so I was looking for something that would provide the remote control functionality of an ERR Mini Commander in a smaller space (and at lower cost). The system I came up with used one Moteino module to read TMCC commands from the Legacy Command base over a serial line, and then use the RFM69 radio link to send those commands to a module installed in the caboose.
The original version required some modifications to the caboose to power the board, and required a separately powered serial interface to the Command Base to transmit commands over the radio link. I decided to improve the setup by (1) powering the remote board directly from track power, using the existing plugs in the MTH caboose, and (2) for the master board that transmits the TMCC commands, providing an optional plug-in interface to the LCS system over the PDI bus.
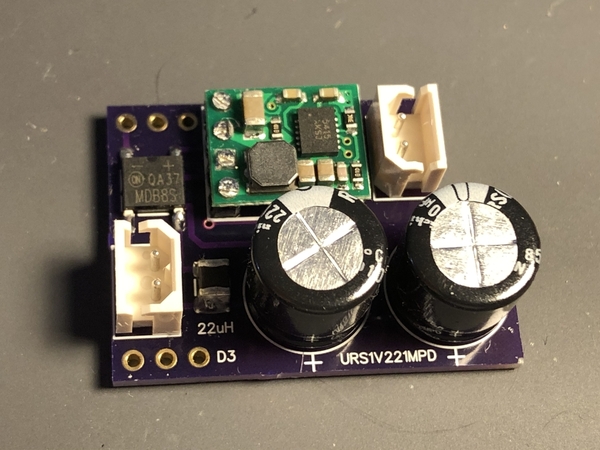
Here's the new board. It uses a Pololu regulator to supply 3.3v to the Moteino, and I managed to squeeze 440 uF of capacitance in to keep the system powered through momentary interruptions. One plug connects the board to track power, and the other plug delivers power to the caboose motor, under the control of an SSR activated by the Moteino. (To keep the board as small as possible, the SSR is actually under the voltage regulator.) The board then fits on top of a Moteino to achieve a low-profile stack that will fit in the MTH caboose:

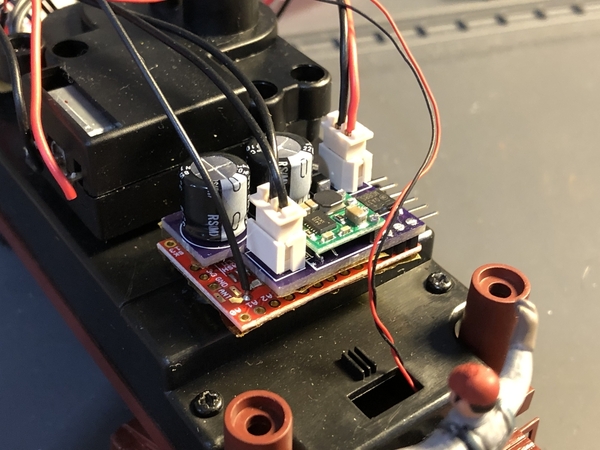
The separate regulator bumps up the price a little, but the system will also work with the Anarduino Mini Wireless (915 MHz CW model), which is available on eBay for $15.00. So the total price of each installation is about $25.00. Here is the Moteino version installed in the MTH signalman caboose, and an Anarduino installed in a Lionel merchandise car:

Here's the schematic and BOM for the remote board. This version uses a SSR to control the output, but it would be pretty easy to design one with a triac or transistor output if you wanted to regulate the AC, or deliver DC.

If you want to make this board yourself, the Gerber files can be found here.
The next posts will describe the board that sends TMCC commands to the remote boards, and the Arduino sketches that run it all.

















