@gunrunnerjohn posted:That should work, but with one issue I can see. With the issues I've heard about with alignment of the Lionel Acela IR link, I wonder how reliable it would be on curves, etc? Also, you need a bit more logic wrapped around them to switch the lights, right? The good side is that there's no interference with other consists, that's one issue to contend with with RF links.
Right. As I said, this is a germinating thought.
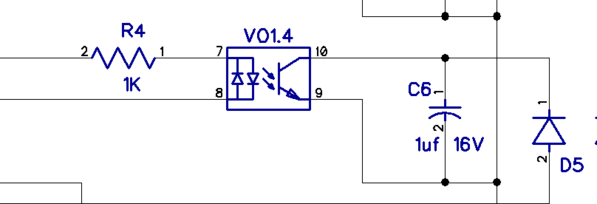
So I cobbled together a simple experiment as shown in above video. On the left is an IR LED (transmitter) driven by a nominal 20 mA. This would represent what is transmitted by the powered car when the tail-light is ON. On the right is a widget that I built some time in the last century which I use to detect the presence of Infrared (IR) energy. I've written about it in previous OGR threads. Basically, when IR energy is present the red LED turns ON. The red LED gets brighter with more IR energy. It is powered by a 9V (DC) battery. The idea is this is essentially what would be the repeater circuitry in the intermediate/intervening cars. When IR energy is detected from the previous car, the 25-cent circuit would repeat the tail-light on/off state via an IR LED (instead of the red LED) on the other end of the car to the next car. And so on.
The experiment was to place the receiver about my guess of the distance between two subway cars....then to rotate the receiver to simulate going around curves.
The video suggests we're in the ball park! I believe you can reliably detect the IR transmission from an adjacent car even going around curves.
As mentioned earlier, this only makes sense if already opening up the intermediate cars to convert from power-hungry bulbs to LEDs. It is a very simple and inexpensive circuit to detect IR energy with an IR detector at one end of the car...and then re-transmit the on/off status to an IR LED at the other end of the car; this daisy-chains the on/off status of the tail-light to the end-car. No "software" or fancy digital circuitry is required!